



TAPS
This acronym used to stand for Tracor Acoustic Profiling
System. That was when Tracor, Inc. was a publicly held
corporation, headquartered in Austin, TX. Our office in San
Diego conducted acoustical research, principally for the
Navy, including some basic research on the use of
multi-frequency acoustics to measure and quantify
zooplankton distributions in the ocean. As a part of that
research, I designed a series of acoustic sensors that
eventually became TAPS. Previous systems evolved from
collections of individual transducers on a frame and
culminated in a 21-frequency system built (by Van Holliday
and Dave Doan) on a surplus mine-hunting sonar towed body.
This system drew power from shipboard equipment. The TAPS
sensors were a compromise design intended to provide useful
data in a portable package running on internal batteries.
Tracor was taken private in the late '80s, went through
bankruptcy, and emerged as a public company once again --
only to be purchased by General Electric PLC (of England).
Tracor was included in the Marconi Electronics group which,
a few years later, was merged with God-knows-what-all from
British Aerospace to become BAE SYSTEMS. And we were firmly
advised that the BAE portion had absolutely no connection
to British Aerospace and was just a name. I suppose that
BAE SYSTEMS is still around -- I get my retirement check
every month.
The TAPS-6 concept derived from the early MAPS systems but
the design began with some 2-frequency systems used on the
BITS mooring that I designed and a 4-frequency predecessor
that is now in mothballs. It was an interesting challenge:
to make a portable, internally-recording gadget that would
act like a ctd but could resolve zooplankton
size-distributions versus depth. It took a number of
iterations to get it pretty close to right.
The first problem was -- what frequencies should we use?
This was answered by selecting the target zooplankters:
copepods. These animals are reasonably-well-modelled by a
truncated fluid sphere model. Van Holliday spent several
hours on his computer to select four (later six)
frequencies from the 21 MAPS frequencies that seemed to
work well estimating size-abundance for these zooplankters.
Long after the fact, I spent some time trying to
rationalize the selection of frequencies and came up with a
way to select the span of frequencies needed for particular
copepod sizes. Fortunately, these approaches agreed with
each other pretty well.
The second problem involved the sample volumes for this
system. The sample volume can be computed from the pulse
length, the range, the speed of sound in water, and the
beam angle of the transducer used to transmit and receive
echoes. We discussed this at length; on the one hand, too
small a sample volume would mean sometimes there would be
very few scatterers in the sample volume -- making the
assumption of volume scattering incorrect. Too large a
sample volume would make it more likely that the relatively
rare larger scatterers (euphausiids, ctenophores, larval
fish, etc.) might contribute to the echo energy. We settled
on a sample volume of about a liter using transducers with
8-12° beamwidths and a 336 microsecond transmit pulse,
sampling at about 1m range. Note that this vastly
simplifies the assumptions we have to make, compared, say,
to an echosounder configuration where the sample volumes
increase inexorably with range.
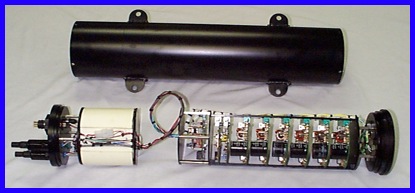
The picture above shows the original version of TAPS-6
exploded. The endcap on the right-hand side contains six
acoustic transducers, resonant at 265, 420, 700, 1100,
1850, and 3000 kHz. There are six transceiver cards (with
the large black capacitors) to drive these transducers. The
other endcap contains a depth sensor, temperature sensor,
and jacks to connect external sensors such as fluorometers
or conductivity sensors. A single-board-computer and
interface circuitry control the functions. A 21.6V NiCad
battery supplies power for 10-14 hours of operation.
The last TAPS (TAPS-6 NewGen) was a complete re-design
utilizing some concepts and designs from a series of
8-frequency systems that were built to operate on moorings.
These TAPS-8 units have been used extensively in the Arctic
by Jeff Napp at NOAA in Seattle. They are getting quite
long in the tooth and probably are nearly ready to be
replaced. The NG TAPS is used by Anne Lebourges-Dhaussy at
IFREMER in Brest, France.
BAE SYSTEMS no longer makes or supports TAPS -- I made a
deal with them when I retired to provide service for
existing customers in exchange for the spare parts and some
test equipment. If you need service or help with a TAPS,
contact me using the email link below. There is little to
no chance you could get me to build you one, but I could
certainly provide you with drawings, schematics, code, and
advice if YOU want to build one. All this information is in
the public domain. Eventually, all that information will
even be right here on this website. For as long as I am
around, anyway …